

In the past, to simulate object grasping behavior, it typically required using a finger gripper or pneumatic gripper combined with a physics engine to achieve object grasping. However, physics engines are prone to generating unstable behavior during the simulation process due to collisions or physics engine calculations.
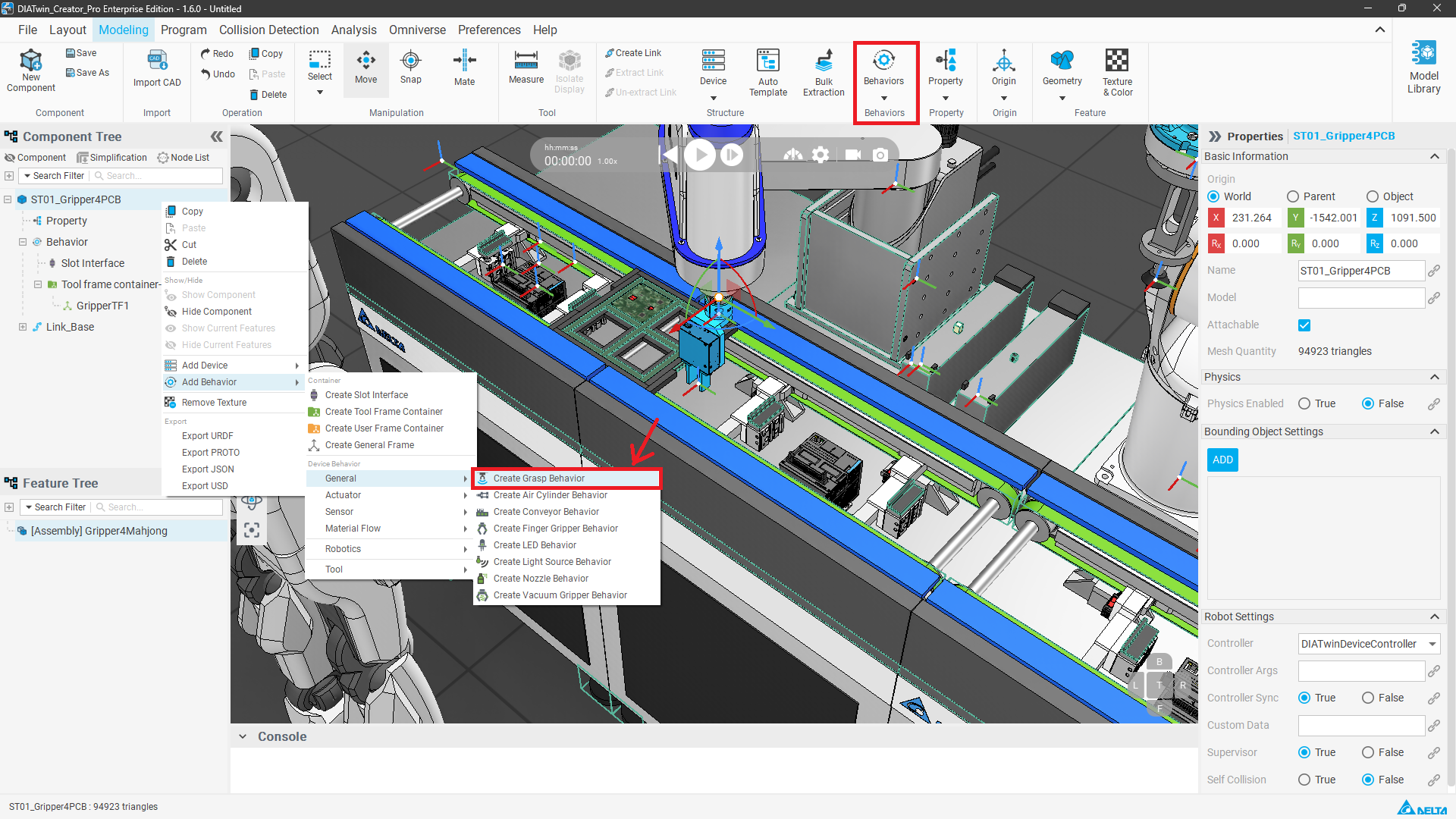
Therefore, we added Grasp Behavior, allowing object grasping behavior to be performed during the simulation process without using a physics engine. This makes the entire simulation process more stable, significantly simplifies configuration steps, and improves user experience.
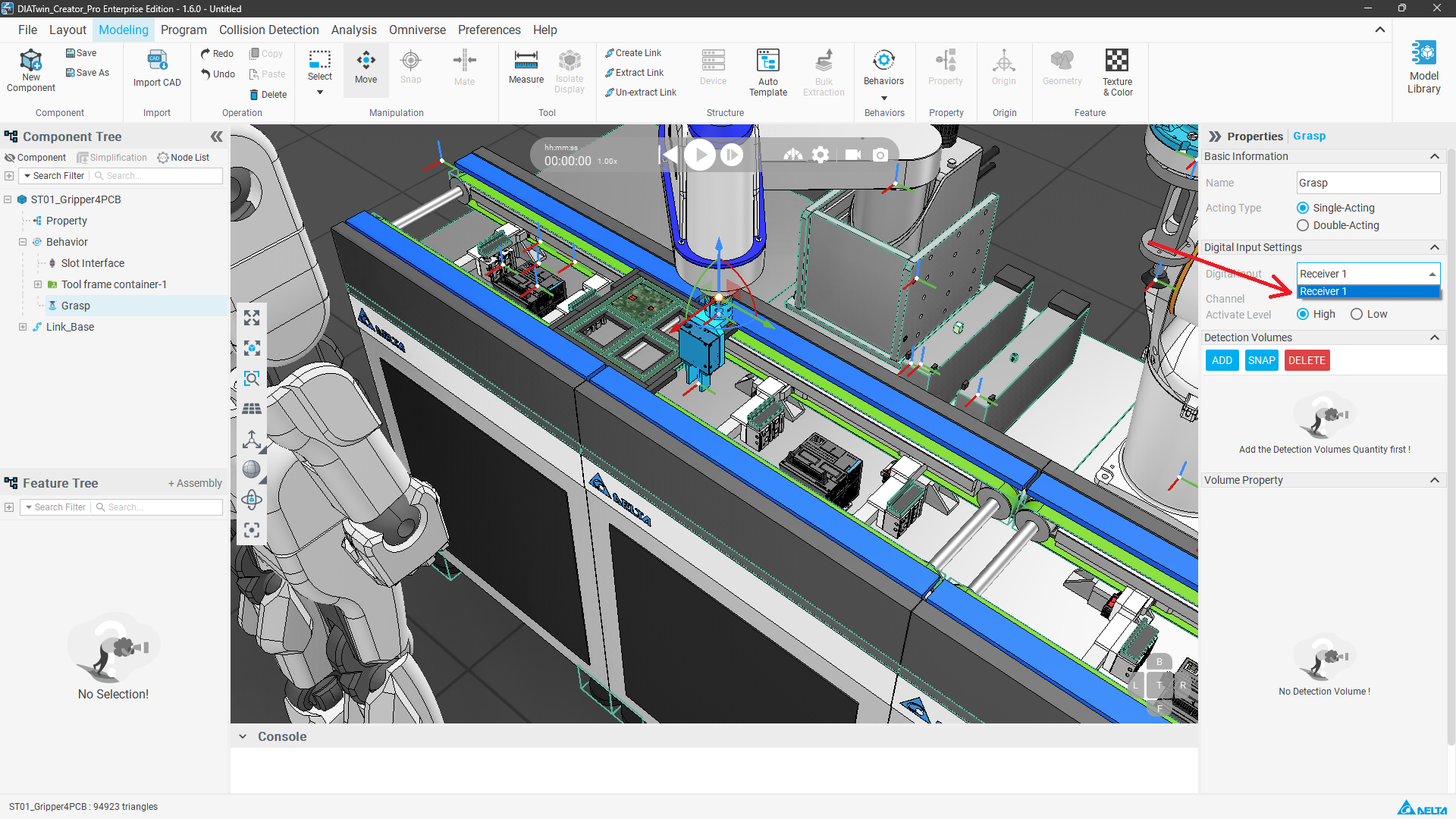
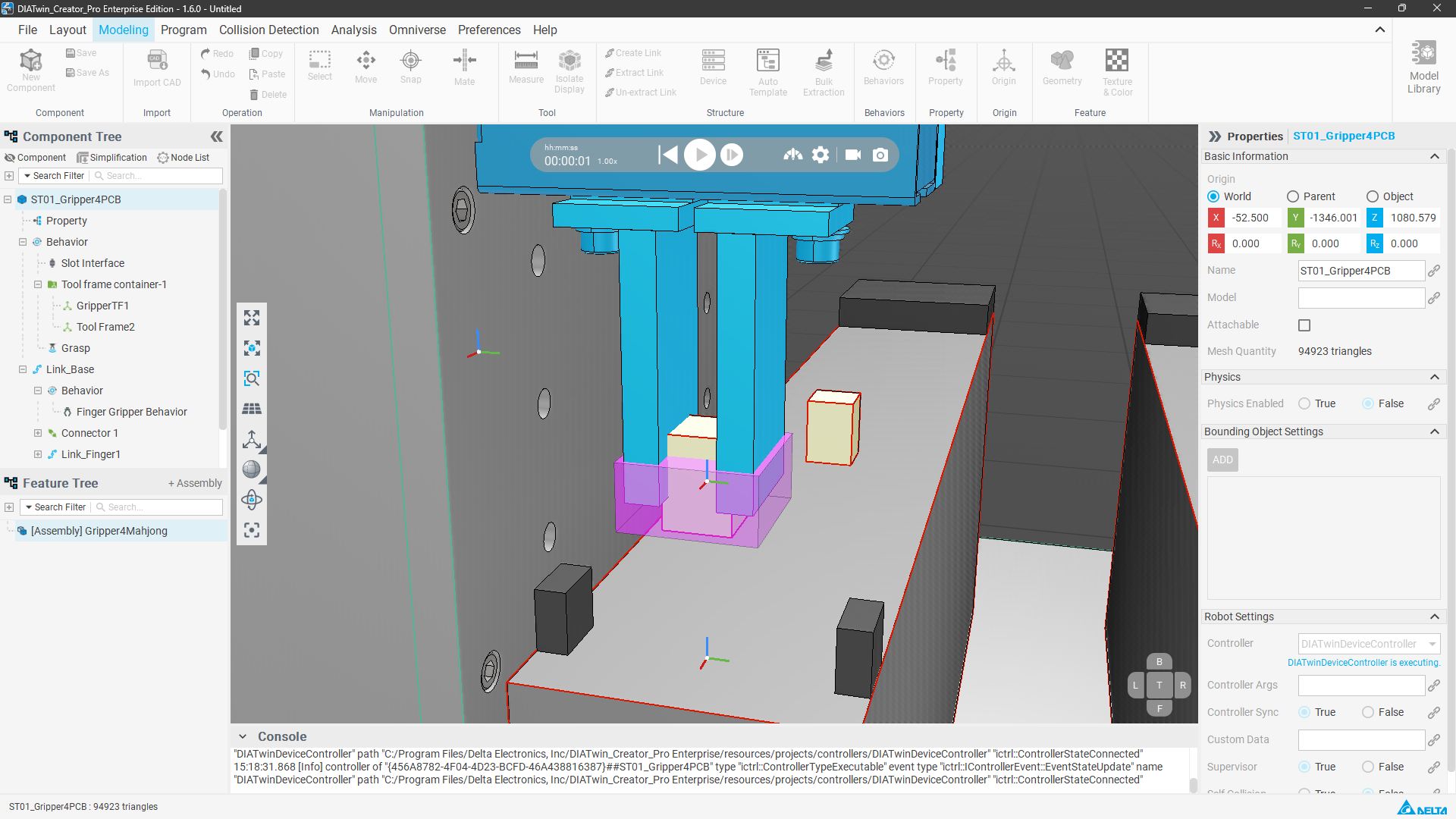
The instant Grasp receives the signal again, it will detach the object. If the placed objects have mutual interference and also have Attachable enabled, the two will attach to each other.